Or more accurately, filing off the stops.
Recently Tim Hirzel asked if I knew of a source of motors without stops, or if the X25.168’s could be modified to remove the stops and open up the full 360 degrees of rotation.
Good question! The X25 Series Buyers Guide lists 6 models of motors without stops, but a quick search turned up no suppliers selling these in small volumes.
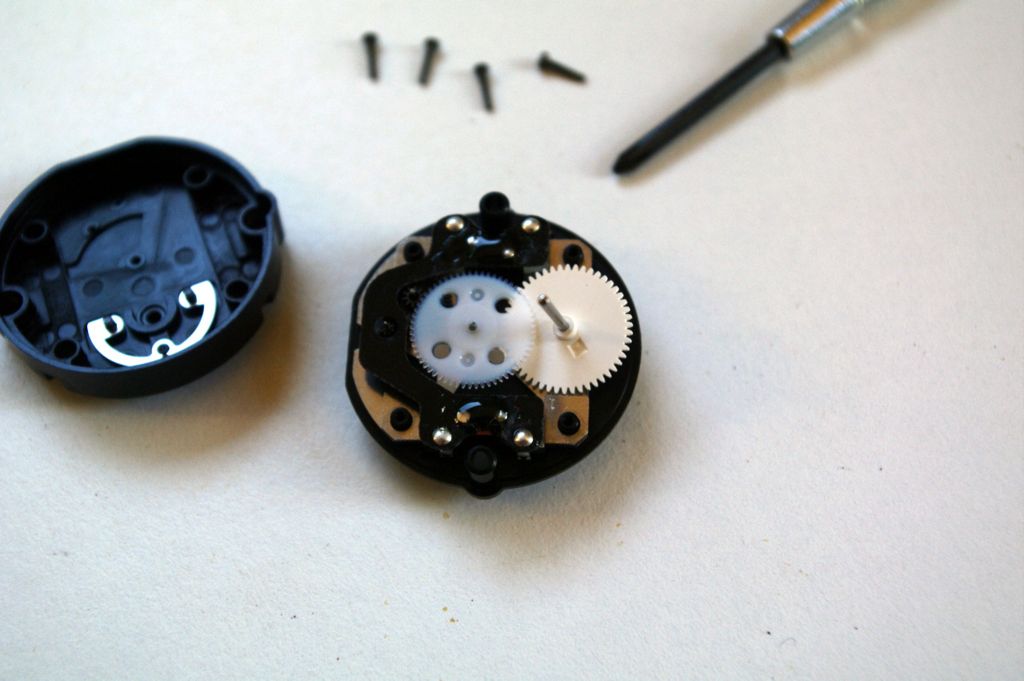
Okay, time to figure out if the stops can be removed. Note that I’m working on a VID-29 clone, not a genuine Switec X25.168 here. There are 4 tiny screws that open the case revealing this:
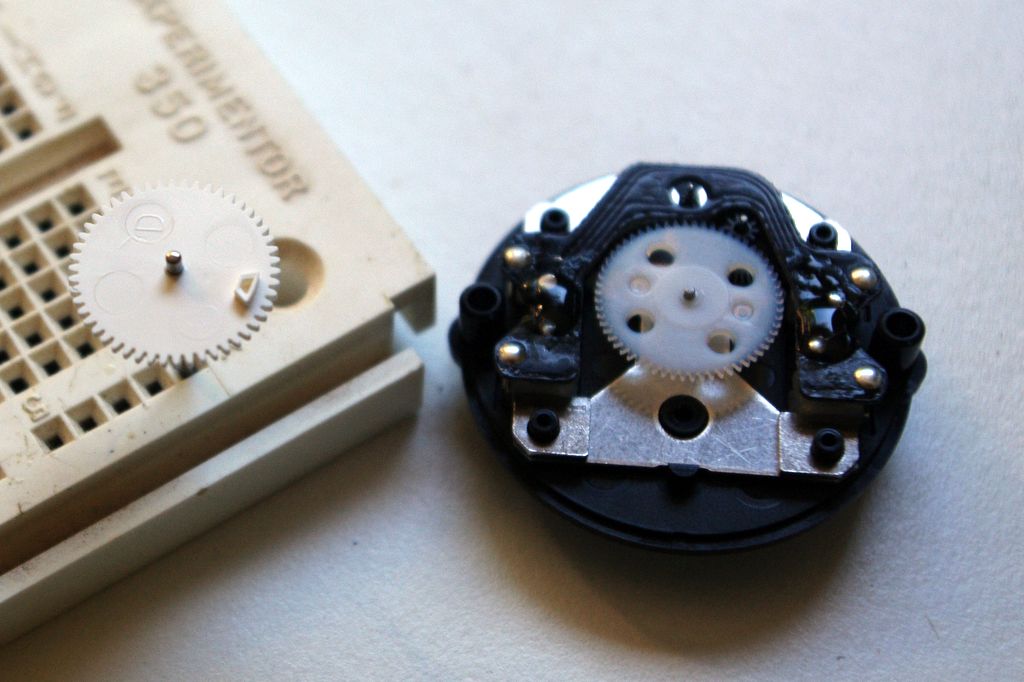
The drive-shaft and attached gear sit loose and can be lifted out. Flipping the gear over reveals the mechanism for the stop; a raised trapezoidal bump on the gear face that stops against a matching protrusion at the bottom of the case.
I cut off the stop with a Stanley knife, and filed it flat with a small file.
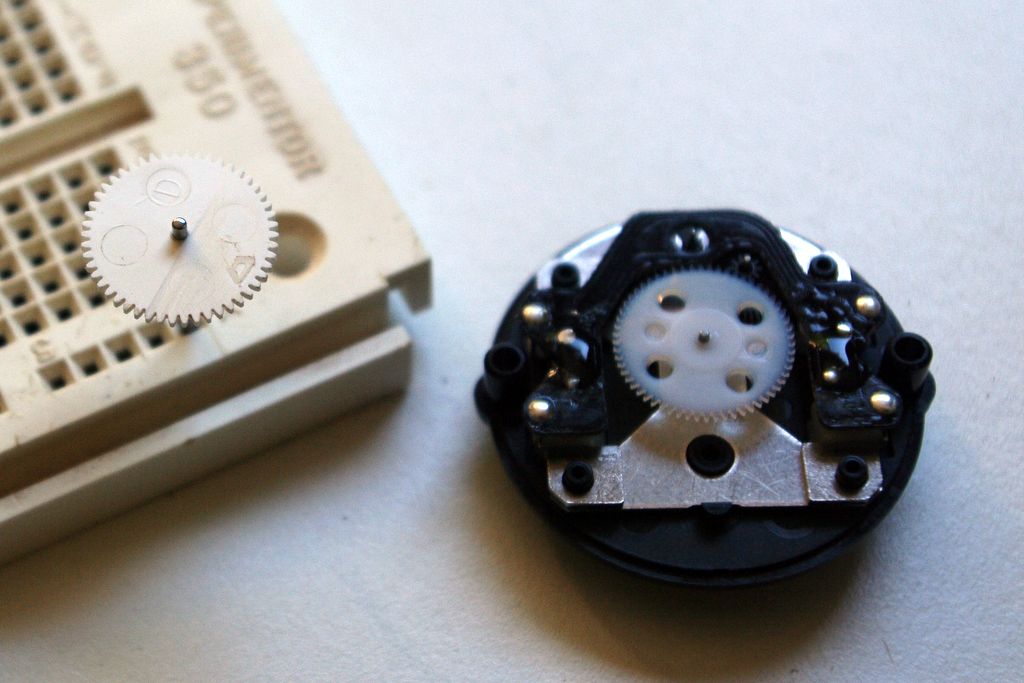
Reassembly was easy, and bugger me, it works.
In the video you can see the needle hesitates on each rotation. This is because of the acceleration/deceleration logic in the SwitecX25 library; I’m accelerating the motor from stop, spinning 360 degrees, decelerating to a stop again, then repeating, using code like this:
for (int i=0;i<nLoops;i++) {
motor->currentStep = 0;
motor->setPosition(360*3);
while (!motor->stopped) motor->update();
}
To keep the speed constant I need to prevent it coming to a stop. I can do that by resetting the origin and destination before it reaches its goal step, like this:
for (int i=0;i<nLoops;i++) {
motor->currentStep = 0; // reset origin on each rotation
motor->setPosition(320*3*2); // set target to way past end of rotation
while (motor->currentStep<360*3) motor->update(); // turn until rotation is complete
}
Or to run the motor in reverse:
for (int i=0;i<nLoops;i++) {
motor->currentStep = 360*3*2;
motor->setPosition(0);
while (motor->currentStep>360*3) motor->update();
}
I think the SwitecX25 library will need some extensions to support stop-less motors… need to think about that a bit.